引言
魔兽世界、仙剑奇侠传这类 MMRPG 游戏,不知道你有没有玩过?在这些游戏中,有一个非常重要的功能,那就是人物角色自动寻路。当人物处于游戏地图中的某个位置的时候,我们用鼠标点击另外一个相对较远的位置,人物就会自动地绕过障碍物走过去。玩过这么多游戏,不知你是否思考过,这个功能是怎么实现的呢?
算法解析
实际上,这是一个非常典型的搜索问题。人物的起点就是他当下所在的位置,终点就是鼠标点击的位置。我们需要在地图中,找一条从起点到终点的路径。这条路径要绕过地图中所有障碍物,并且看起来要是一种非常聪明的走法。所谓“聪明”,笼统地解释就是,走的路不能太绕。理论上讲,最短路径显然是最聪明的走法,是这个问题的最优解。
不过,在第 44 节最优出行路线规划问题中,我们也讲过,如果图非常大,那 Dijkstra 最短路径算法的执行耗时会很多。在真实的软件开发中,我们面对的是超级大的地图和海量的寻路请求,算法的执行效率太低,这显然是无法接受的。
实际上,像出行路线规划、游戏寻路,这些真实软件开发中的问题,一般情况下,我们都不需要非得求最优解(也就是最短路径)。在权衡路线规划质量和执行效率的情况下,我们只需要寻求一个次优解就足够了。那如何快速找出一条接近于最短路线的次优路线呢?
这个快速的路径规划算法,就是我们今天要学习的A* 算法。实际上,A* 算法是对 Dijkstra 算法的优化和改造。如何将 Dijkstra 算法改造成 A* 算法呢?为了更好地理解接下来要讲的内容,我建议你先温习下第 44 节中的 Dijkstra 算法的实现原理。
Dijkstra 算法有点儿类似 BFS 算法,它每次找到跟起点最近的顶点,往外扩展。这种往外扩展的思路,其实有些盲目。为什么这么说呢?我举一个例子来给你解释一下。下面这个图对应一个真实的地图,每个顶点在地图中的位置,我们用一个二维坐标(x,y)来表示,其中,x 表示横坐标,y 表示纵坐标。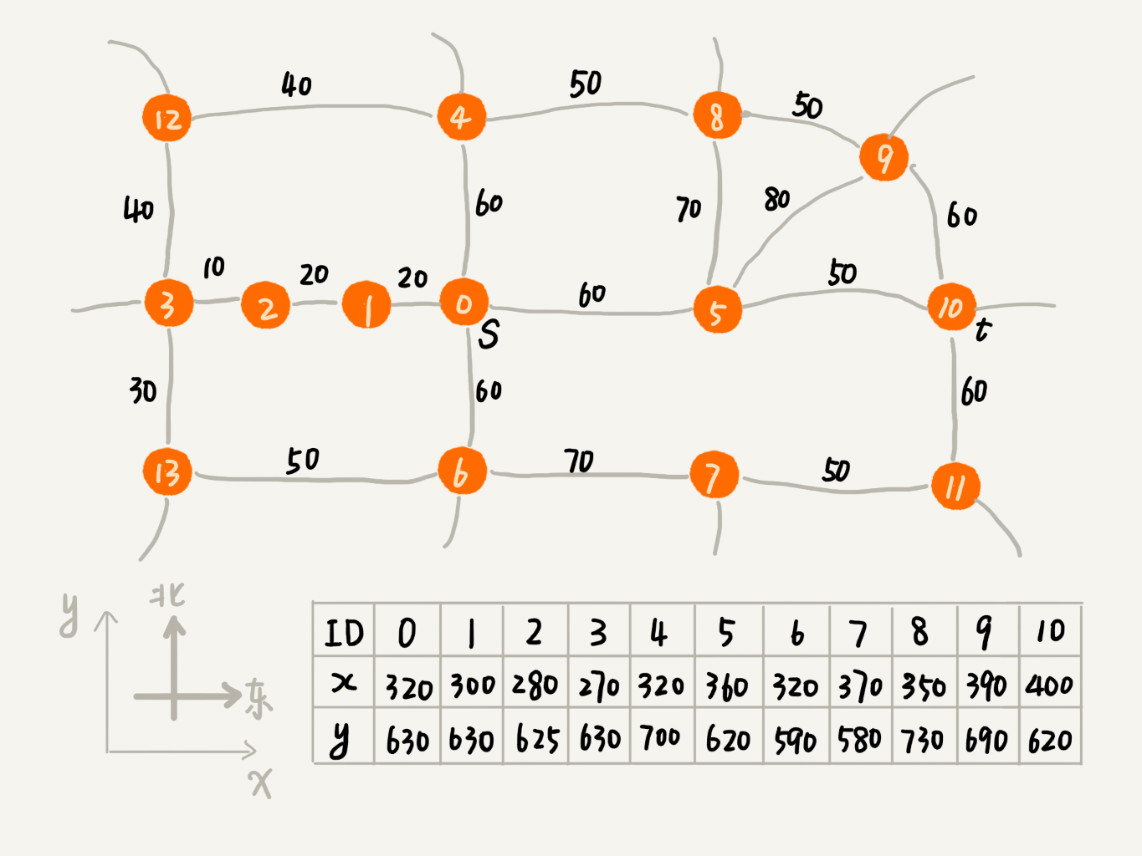
在 Dijkstra 算法的实现思路中,我们用一个优先级队列,来记录已经遍历到的顶点以及这个顶点与起点的路径长度。顶点与起点路径长度越小,就越先被从优先级队列中取出来扩展,从图中举的例子可以看出,尽管我们找的是从 s 到 t 的路线,但是最先被搜索到的顶点依次是 1,2,3。通过肉眼来观察,这个搜索方向跟我们期望的路线方向(s 到 t 是从西向东)是反着的,路线搜索的方向明显“跑偏”了。
之所以会“跑偏”,那是因为我们是按照顶点与起点的路径长度的大小,来安排出队列顺序的。与起点越近的顶点,就会越早出队列。我们并没有考虑到这个顶点到终点的距离,所以,在地图中,尽管 1,2,3 三个顶点离起始顶点最近,但离终点却越来越远。
如果我们综合更多的因素,把这个顶点到终点可能还要走多远,也考虑进去,综合来判断哪个顶点该先出队列,那是不是就可以避免“跑偏”呢?
当我们遍历到某个顶点的时候,从起点走到这个顶点的路径长度是确定的,我们记作 g(i)(i 表示顶点编号)。但是,从这个顶点到终点的路径长度,我们是未知的。虽然确切的值无法提前知道,但是我们可以用其他估计值来代替。
这里我们可以通过这个顶点跟终点之间的直线距离,也就是欧几里得距离,来近似地估计这个顶点跟终点的路径长度(注意:路径长度跟直线距离是两个概念)。我们把这个距离记作 h(i)(i 表示这个顶点的编号),专业的叫法是启发函数(heuristic function)。因为欧几里得距离的计算公式,会涉及比较耗时的开根号计算,所以,我们一般通过另外一个更加简单的距离计算公式,那就是曼哈顿距离(Manhattan distance)。曼哈顿距离是两点之间横纵坐标的距离之和。计算的过程只涉及加减法、符号位反转,所以比欧几里得距离更加高效。
int hManhattan(Vertex v1, Vertex v2) { // Vertex 表示顶点,后面有定义
return Math.abs(v1.x - v2.x) + Math.abs(v1.y - v2.y);
}
原来只是单纯地通过顶点与起点之间的路径长度 g(i),来判断谁先出队列,现在有了顶点到终点的路径长度估计值,我们通过两者之和 f(i)=g(i)+h(i),来判断哪个顶点该最先出队列。综合两部分,我们就能有效避免刚刚讲的“跑偏”。这里 f(i) 的专业叫法是估价函数(evaluation function)。
从刚刚的描述,我们可以发现,A* 算法就是对 Dijkstra 算法的简单改造。实际上,代码实现方面,我们也只需要稍微改动几行代码,就能把 Dijkstra 算法的代码实现,改成 A* 算法的代码实现。
在 A* 算法的代码实现中,顶点 Vertex 类的定义,跟 Dijkstra 算法中的定义,稍微有点儿区别,多了 x,y 坐标,以及刚刚提到的 f(i) 值。图 Graph 类的定义跟 Dijkstra 算法中的定义一样。为了避免重复,我这里就没有再贴出来了。
private class Vertex {
public int id; // 顶点编号 ID
public int dist; // 从起始顶点,到这个顶点的距离,也就是 g(i)
public int f; // 新增:f(i)=g(i)+h(i)
public int x, y; // 新增:顶点在地图中的坐标(x, y)
public Vertex(int id, int x, int y) {
this.id = id;
this.x = x;
this.y = y;
this.f = Integer.MAX_VALUE;
this.dist = Integer.MAX_VALUE;
}
}
// Graph 类的成员变量,在构造函数中初始化
Vertex[] vertexes = new Vertex[this.v];
// 新增一个方法,添加顶点的坐标
public void addVetex(int id, int x, int y) {
vertexes[id] = new Vertex(id, x, y)
}
A* 算法的代码实现的主要逻辑是下面这段代码。它跟 Dijkstra 算法的代码实现,主要有 3 点区别:
优先级队列构建的方式不同。A* 算法是根据 f 值(也就是刚刚讲到的 f(i)=g(i)+h(i))来构建优先级队列,而 Dijkstra 算法是根据 dist 值(也就是刚刚讲到的 g(i))来构建优先级队列;
A* 算法在更新顶点 dist 值的时候,会同步更新 f 值;
循环结束的条件也不一样。Dijkstra 算法是在终点出队列的时候才结束,A* 算法是一旦遍历到终点就结束。
public void astar(int s, int t) { // 从顶点 s 到顶点 t 的路径
int[] predecessor = new int[this.v]; // 用来还原路径
// 按照 vertex 的 f 值构建的小顶堆,而不是按照 dist
PriorityQueue queue = new PriorityQueue(this.v);
boolean[] inqueue = new boolean[this.v]; // 标记是否进入过队列
vertexes[s].dist = 0;
vertexes[s].f = 0;
queue.add(vertexes[s]);
inqueue[s] = true;
while (!queue.isEmpty()) {
Vertex minVertex = queue.poll(); // 取堆顶元素并删除
for (int i = 0; i
<
adj[minVertex.id].size(); ++i) {
Edge e = adj[minVertex.id].get(i); // 取出一条 minVetex 相连的边
Vertex nextVertex = vertexes[e.tid]; // minVertex--
>
nextVertex
if (minVertex.dist + e.w
<
nextVertex.dist) { // 更新 next 的 dist,f
nextVertex.dist = minVertex.dist + e.w;
nextVertex.f
= nextVertex.dist+hManhattan(nextVertex, vertexes[t]);
predecessor[nextVertex.id] = minVertex.id;
if (inqueue[nextVertex.id] == true) {
queue.update(nextVertex);
} else {
queue.add(nextVertex);
inqueue[nextVertex.id] = true;
}
}
if (nextVertex.id == t) break; // 只要到达 t 就可以结束 while 了
}
}
// 输出路径
System.out.print(s);
print(s, t, predecessor); // print 函数请参看 Dijkstra 算法的实现
尽管 A* 算法可以更加快速的找到从起点到终点的路线,但是它并不能像 Dijkstra 算法那样,找到最短路线。这是为什么呢?
要找出起点 s 到终点 t 的最短路径,最简单的方法是,通过回溯穷举所有从 s 到达 t 的不同路径,然后对比找出最短的那个。不过很显然,回溯算法的执行效率非常低,是指数级的。
Dijkstra 算法在此基础之上,利用动态规划的思想,对回溯搜索进行了剪枝,只保留起点到某个顶点的最短路径,继续往外扩展搜索。动态规划相较于回溯搜索,只是换了一个实现思路,但它实际上也考察到了所有从起点到终点的路线,所以才能得到最优解。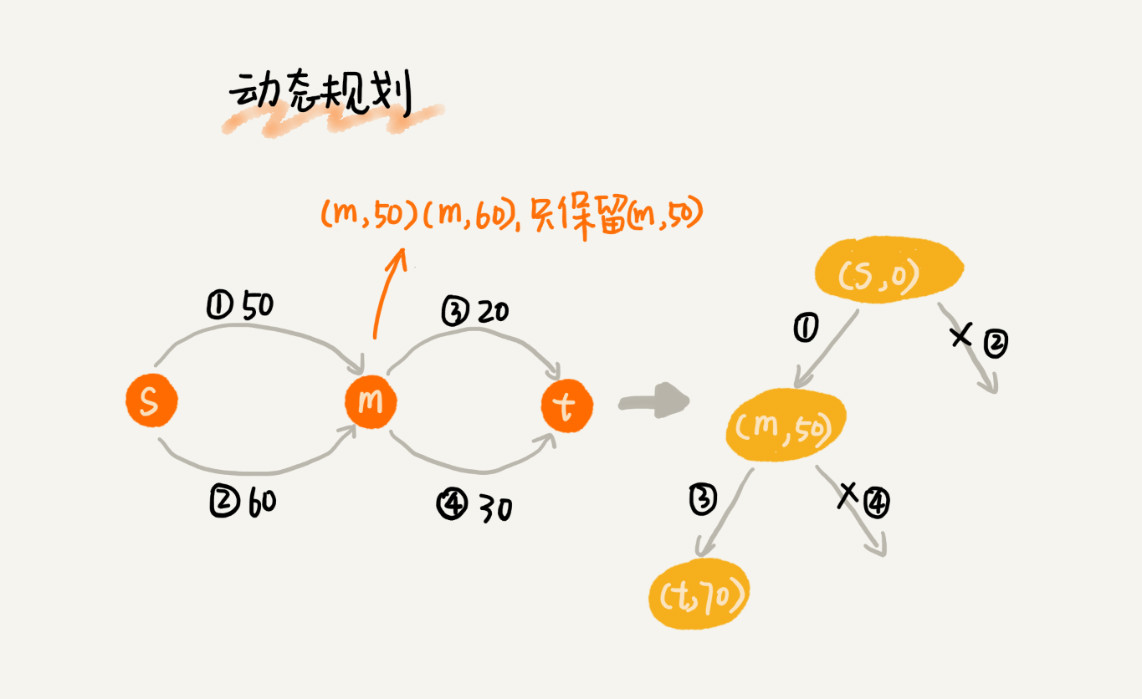
A* 算法之所以不能像 Dijkstra 算法那样,找到最短路径,主要原因是两者的 while 循环结束条件不一样。刚刚我们讲过,Dijkstra 算法是在终点出队列的时候才结束,A* 算法是一旦遍历到终点就结束。对于 Dijkstra 算法来说,当终点出队列的时候,终点的 dist 值是优先级队列中所有顶点的最小值,即便再运行下去,终点的 dist 值也不会再被更新了。对于 A* 算法来说,一旦遍历到终点,我们就结束 while 循环,这个时候,终点的 dist 值未必是最小值。
A* 算法利用贪心算法的思路,每次都找 f 值最小的顶点出队列,一旦搜索到终点就不在继续考察其他顶点和路线了。所以,它并没有考察所有的路线,也就不可能找出最短路径了。
搞懂了 A* 算法,我们再来看下,如何借助 A* 算法解决今天的游戏寻路问题?
要利用 A* 算法解决这个问题,我们只需要把地图,抽象成图就可以了。不过,游戏中的地图跟第 44 节中讲的我们平常用的地图是不一样的。因为游戏中的地图并不像我们现实生活中那样,存在规划非常清晰的道路,更多的是宽阔的荒野、草坪等。所以,我们没法利用 44 节中讲到的抽象方法,把岔路口抽象成顶点,把道路抽象成边。
实际上,我们可以换一种抽象的思路,把整个地图分割成一个一个的小方块。在某一个方块上的人物,只能往上下左右四个方向的方块上移动。我们可以把每个方块看作一个顶点。两个方块相邻,我们就在它们之间,连两条有向边,并且边的权值都是 1。所以,这个问题就转化成了,在一个有向有权图中,找某个顶点到另一个顶点的路径问题。将地图抽象成边权值为 1 的有向图之后,我们就可以套用 A* 算法,来实现游戏中人物的自动寻路功能了。
总结引申
我们今天讲的 A* 算法属于一种启发式搜索算法(Heuristically Search Algorithm)。实际上,启发式搜索算法并不仅仅只有 A* 算法,还有很多其他算法,比如 IDA* 算法、蚁群算法、遗传算法、模拟退火算法等。如果感兴趣,你可以自行研究下。
启发式搜索算法利用估价函数,避免“跑偏”,贪心地朝着最有可能到达终点的方向前进。这种算法找出的路线,并不是最短路线。但是,实际的软件开发中的路线规划问题,我们往往并不需要非得找最短路线。所以,鉴于启发式搜索算法能很好地平衡路线质量和执行效率,它在实际的软件开发中的应用更加广泛。实际上,在第 44 节中,我们讲到的地图 App 中的出行路线规划问题,也可以利用启发式搜索算法来实现。
课后思考
我们之前讲的“迷宫问题”是否可以借助 A* 算法来更快速地找到一个走出去的路线呢?如果可以,请具体讲讲该怎么来做;如果不可以,请说说原因。